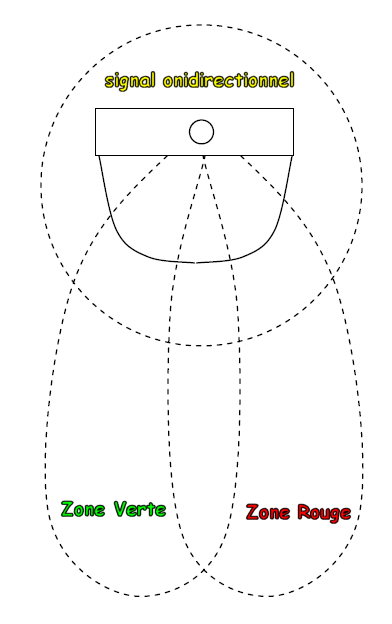
Diffusion d'un faisseau infrarouge omnidirectionnel pour localiser la base.
Quand le Robot est dans la zone Rouge il tourne à gauche.
Quand le Robotest dans la zone Verte il tourne à droite.
Quand le Roomba est dans la zone commune Rouge & Verte il avance tout droit.