|
Les deux roues motrices arrières sont indépendantes ce qui permet
de faire tourner l'aspirateur robot sur lui même en faisant tourner les
deux moteurs dans un sens différent (système “char”).
.
Roue motrice avec motoreducteur quatre étages.
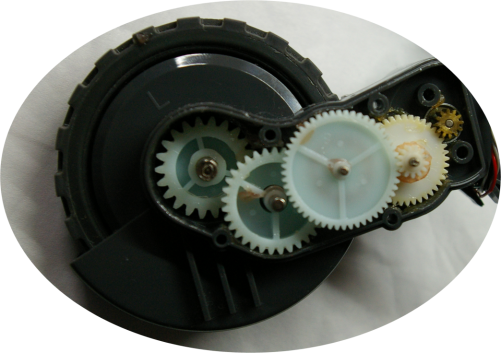
De plus chaque roue est équipée d'un codeur simple (un seul signal
carré) générant 200 impulsions par tour moteur.
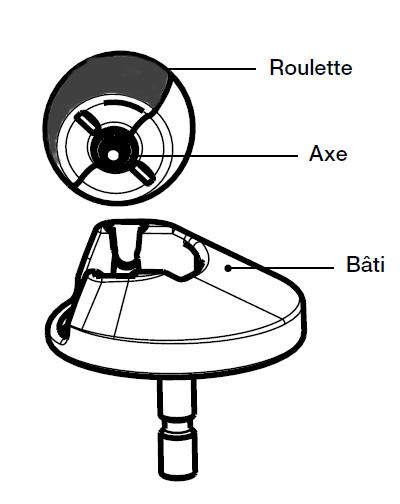
La rotation de la roue folle est détectée par un capteur infrarouge et
la couleur NOIR et BLANC de sa roulette.
..........................
|