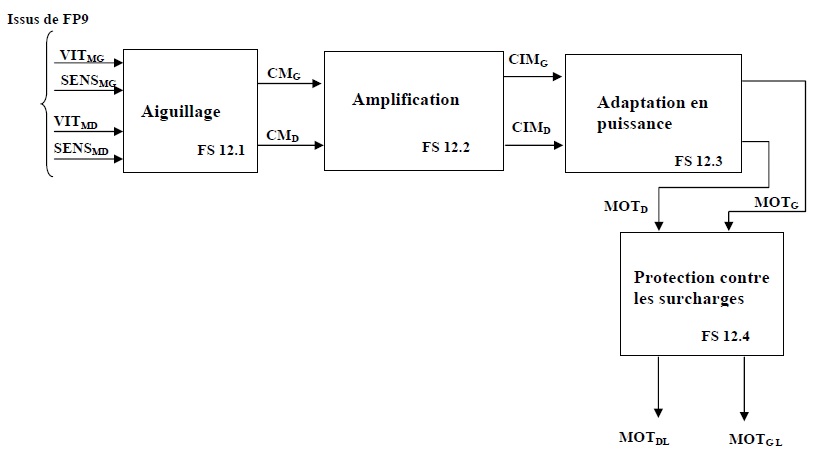
Schéma fonctionnel de degré 2 de FP 12 «...
AccueilSchéma fonctionnel de deg...Définition des fonctions pri...Etude fonctionnelle de deg...Schéma fonctionnel de degré...Schéma fonctionnel de degré...Schéma fonctionnel de degré...Schéma fonctionnel de degré...Schéma fonctionnel de degré...Définition des fonctions second...Schéma fonctionnel de degré...
| Aspirateur Robot > Dossier technique > Cahier des Charges Fonctionel > Analyse > Diagrammes fonctionnels > Etude fonctionnelle de degré 1 et 2 de la partie commande > Etude fonctionnelle de degré 2 > Schéma fonctionnel de degré 2 de FP 12 « Interface roues motrices » | |||
|