|
Cette famille de générateur est la résultante de contraintes physiques
existantes. En effet le courant délivré par un aérogénérateur couplé
au réseau électrique ne saurait être autre que du courant alternatif 50
ou 60 Hertz selon que l’on est en Europe ou au Etats Unis c’est la
première contrainte. L’autre provient du type de génératrice que l’on
va utiliser, dans un souci de rentabilité il est plus économique
d’utiliser une génératrice existante que de développer une
génératrice spécifique. Pour cette raison on utilise une machine
asynchrone ou MAS. La forme la plus courante de MAS est le moteur
asynchrone à cage d’écureuil.
Dans une MAS la tension de fréquence F qui alimente le stator crée
un flux magnétique qui tourne à la vitesse du réseau d’alimentation.
Ce flux balayant le bobinage rotorique (ou la cage d’écureuil) y induit
une force électromotrice ce bobinage étant en court circuit la fem fait
apparaître un courant induit et donc un flux magnétique rotorique.
C’est la combinaison de ces deux flux qui entraîne la rotation du
moteur. Le rotor tournera à une vitesse d’autant plus faible que la
charge est grande. L’écart de vitesse entre la vitesse réelle est la
vitesse théorique s’appelle le glissement noté g il s’exprime en % et
ne peut dépasser quelques pourcents.
Le glissement est égal
g = (Ns – N)/ Ns
Ns étant la fréquence de rotation
théorique de synchronisme et N la
fréquence de rotationréelle. Ce type de machine est utilisé sous sa
forme originale en tant que moteur électrique. Ces moteurs sont
caractérisés par leur nombre de pôles qui imposent leur vitesse de
rotation.
La vitesse de rotation d’un moteur est donnée par la formule
suivante :
N (
fréquence de rotation en tours.
minute-1
)= 60 x F
(fréquence du réseau) / P (nombre de paire de
pôles)
Exemple pour un moteur en 2 paires de pôles alimenté en 50 hertz
cela donne une vitesse de rotation de 1500 tours.minutes
-1 cette
vitesse est une vitesse théorique en l’absence de glissement.
Pour être utilisé en génératrice ce moteur devra être alimenté par une
batterie de condensateur afin de fournir un champ d’excitation et on
devra le faire tourner à une vitesse légèrement supérieure à la vitesse
de synchronisme qui est de 1500 tours dans l’exemple ci-dessus.
Tout se passe comme si la génératrice fournissant du courant au
réseau voulait par sa vitesse de rotation, changer la fréquence du
réseau ce qui compte tenu du rapport de puissance est impossible.
Sachant que la fréquence de rotation
des pâles d’un aérogénérateur
de quelques centaines de KVA est comprise entre 20 et 40 tours par
minute, on comprend tout de suite que la génératrice n’est pas
montée directement en bout des pales. Il est nécessaire d’augmenter
la vitesse des pales par ce que l’on appelle le multiplicateur. Cet
organe mécanique fonctionne comme une boite à vitesse à un seul
rapport ou la vitesse de sortie est plus élevée que la vitesse d’entrée.
L’arbre de sortie est couplé au moteur et à un frein qui permet de
bloquer l’ensemble de la mécanique pour la mise en sécurité ou la
maintenance de l’installation.
On voit bien que la machine produit si et seulement si la vitesse de
rotation est légèrement supérieure à 1500 tours.minute
-1.
C’est pour cela que l’on parle d’un seul point de fonctionnement.
Comme il existe des moteurs à deux vitesses par commutation
d’enroulement et par la modification du nombre de pôles (2 pôles
pour 1500 tours.minute
-1 et 4 pôles pour 750 tours.
minute-1.), il
existe des aérogénérateurs à deux points de fonctionnement. Malgré
cette contrainte qui ne permet pas d’utiliser tout le potentiel de vent,
l’intérêt de ces machines est lié à la simplicité et à la robustesse du
générateur qui ne comporte pas d’électronique de puissance.
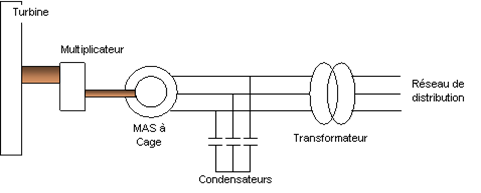
Schéma d’un aérogénérateur avec machine asynchrone à
cage
MAS à cage auto excitée
|