|
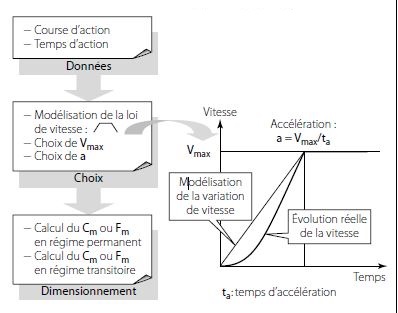
Tous ces actionneurs doivent majoritairement réaliser une course dans un temps imparti ; ce temps
étant lui-même conditionné par le temps de cycle de la machine dans laquelle l’actionneur est
intégré. Leur dimensionnement consiste essentiellement à calculer le couple
(C
m) ou l’
effort (F
m)
moteur nécessaire en phase transitoire à partir d’une valeur d’accélération maximale choisie pour
les exigences de ce temps d’action. En général, cette détermination se fait à partir d’une
modélisation cinématique le plus souvent de type trapézoïdale en vitesse.
Démarche:
En conséquence, quel que soit le type de commande (TOR ou contrôlée), deux points
fondamentaux doivent être résolus en phase transitoire :
– l’élaboration d’une loi de conduite (point de vue cinématique);
– la maîtrise des performances dynamiques à satisfaire (point de vue énergétique).
|